Машына для тэсціравання

1 .1 Асаблівасці
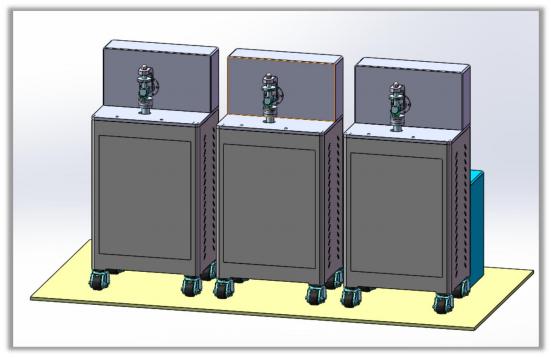
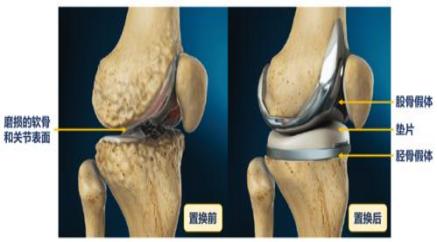
Тэстар зносу каленнага сустава HK 3 складаецца з трох частак: тэставы хост, прыстасаванне і частка электроннага кіравання. Ён можа імітаваць знос, стомленасць і адслойванне каленных імплантатаў і іншыя працэсы пашкоджання, а таксама можа праверыць 3 каленныя суставы адначасова. Імплантаты. Гэтая выпрабавальная машына аўтаматычна кантралюе выпрабавальную сілу, час і хуткасць выпрабавання, а таксама вымярае выпрабавальную сілу і крутоўны момант у рэжыме рэальнага часу. Ён прымяняецца да вытворчасці, выкарыстання і даследаванняў пратэзаў каленнага сустава і ў іншых сумежных галінах медыцыны.
Прывад шпіндзеля выкарыстоўвае імпартны серварухавік пераменнага току і сістэму кіравання, якая можа рэалізаваць бесступенькавае рэгуляванне хуткасці і неабходны разлік пастаяннага крутоўнага моманту/пастаяннай восевай сілы ў дыяпазоне хуткасцей; выпрабавальная сіла прыкладваецца з дапамогай сістэмы нагрузкі шрубавай спружыны. Выпрабавальнае высілак прымяняецца стабільна і надзейна, і аператар можа ўсталяваць выпрабавальнае высілак на інтэрфейсе кампутара; хуткасць кручэння шпіндзеля. Такія параметры, як колькасць абаротаў, выпрабавальная сіла і час выпрабавання, кантралююцца камп'ютэрам, які можа збіраць тэставыя даныя ў рэжыме рэальнага часу і будаваць іх графік. Можна стварыць адпаведную тэставую крывую, а тэставыя даныя або крывую можна захоўваць, здабываць і раздрукоўваць па жаданні.
Трохбаковая нагрузачная сістэма з прывадам серварухавіка з рознымі кампанентамі для поўнага прыціскання сустава, кручэння, згінання, адвядзення і іншых рухаў, чатырохкампанентны модуль датчыка сілы выпрабоўвае восевую сілу крутоўнага моманту, гарызантальную цягу і згінанне адпаведна Крутоўны момант падчас разгінання , трохбаковы сервопривод, абсталяваны высокадакладным энкодэрам, вымярэннем вугла ў рэжыме рэальнага часу і зрушэнне і забяспечваюць эфектыўную крыніцу даных для кіравання галоўным кампутарам.
Кожны механізм руху незалежна кантралюецца і каардынуецца, з трыма станцыямі і 15 восямі для завяршэння шліфоўкі кампанентаў злучэння.
1.2 Асноўныя характарыстыкі
1. Праграмнае забеспячэнне для кіравання прыборам з кітайскім інтэрфейсам.
2. Праграмнае забеспячэнне для прыбора гатова да выкарыстання, спецыяльнае праграмнае забеспячэнне не патрабуецца.
3. Ступені свабоды: кожная тэставая станцыя можа рэалізаваць згінанне/разгінанне, унутранае/знешняе кручэнне, рух наперад/назад, трохмернае кіраванне рухам і нагрузку восевай сілай, і кожная ступень свабоды можа быць кантраляваны. Выяўляюцца і датчык, і сіла; магчыма свабоднае перамяшчэнне ўнутр / вонкі і ўнутр / вонкі.
4. Нелінейнасць датчыка не перавышае 0,10% поўнай шкалы, а гістэрэзіс не перавышае 0,10%, паўтаральнасць не перавышае 0,05% поўнай шкалы.
5. Зрушэнне і дыяпазон датчыка зрушэння: восевае зрушэнне 100 мм, згінанне/разгінанне 120, унутраная ратацыя/вонкавая ратацыя 20, пярэдняе/задняе зрушэнне 15 мм, медыяльнае/бакавое зрушэнне 5 мм, інверсія/вальгус.
6. Грузападымальнасць і дыяпазон датчыка сілы: восевая нагрузка 3 кН, унутраны / знешні крутоўны момант 20 Нм, нагрузка наперад / назад 1 кН.
7. Дакладнасць кантролю сілы і зрушэння: Памылка амплітуды сілы і зрушэння ў межах аднаго цыклу не павінна перавышаць зададзены максімум. Максімальная памылка фазы не павінна перавышаць 3% ад поўнага цыклу. Прыбор пратэставаны ў адпаведнасці са стандартамі ISO 14243-1 і ISO 14243-3 у кожнай кіраванай ступені свабоды. Вымераныя крывыя і значэнні адхіленняў датчыкаў сілы і перамяшчэння.
8. Ён мае васьміканальную функцыю аналагавага ўводу і можа сінхранізавацца са знешнімі дадзенымі.
9. Тэставая частата: 1 Гц, дакладнасць 0,1 Гц.
10. Сістэма кіравання: яна павінна быць абсталявана асобным шматстанцыйным, шматканальным сервакантролерам для дасягнення аўтаматычнага кантролю сілы і перамяшчэння па замкнёным контуры.
11. Кантролер павінен мець магчымасць выконваць кампенсацыю рэгулявання размаху, каб гарантаваць, што пікавае значэнне, неабходнае сігналу, можа быць дакладна дасягнута, калі цыклічны сігнал выкарыстоўваецца ў якасці інструкцыі кіравання.
12. Ён павінен мець магчымасць рэалізаваць праграмнае тэсціраванне нестандартных крывых хады; умець выконваць паэтапнае ручное кіраванне кожнай кіраванай ступенню свабоды; і мець магчымасць экспартаваць неапрацаваныя даныя ў фармаце Excel.
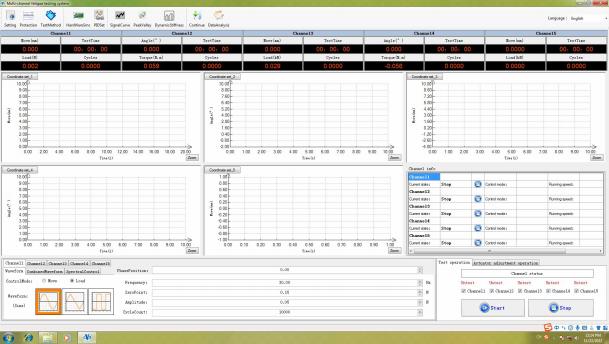
13. Падчас выпрабаванняў праграмнае забеспячэнне павінна мець магчымасць адлюстроўваць крывыя сілы і перамяшчэння кожнай станцыі ў рэжыме рэальнага часу, а таксама сістэмы кіравання. Сістэма павінна мець магчымасць аўтаматычна наладжваць крывую руху ўзору ў адпаведнасці з мэтавай крывой без ручнога ўмяшання.
14. Частата кіравання замкнёным контурам у рэальным часе ≤ 6 кГц, за выключэннем рэжыму кіравання сілай і перамяшчэннем, кантролер павінен мець магчымасць рэалізоўваць рэжым кіравання разліковай зменнай.
15. Лічбавая частата дыскрэтызацыі не павінна быць меншай за 100 кГц, а метад выбаркі павінен уключаць: пікавае значэнне, значэнне спаду, час, час, максімум, мінімум, сярэдняе значэнне, цыкл / лагарыфм і г.д.
16. Ён мае двайны рэжым, працоўны рэжым абмежавання зваротнай сувязі па канале.
17. Ён мае функцыю самаправеркі адсутнасці ўзбуджэння датчыка.
18. Тэмпература: тэмпература змазачнай асяроддзя можа падтрымлівацца на ўзроўні (37 ℃), і ёсць сістэма кантролю тэмпературы.
19. Змазачнае асяроддзе: паверхня злучэння можа быць пагружана ў змазачнае асяроддзе, і змазачнае асяроддзе павінна быць герметызавана без уцечкі; і абсталяваны прыладай кантролю ўцечкі.
20. Тэставыя кампаненты: абсталяваны неабходным інструментам для тэсціравання, загрузкі працоўных станцый і загрузкі для ўсіх рухаў. Рабочая станцыя для апускання забяспечвае эталонныя стандартныя ўзоры для каліброўкі абсталявання і ліквідацыі непаладак.
21. Кнопка аварыйнай прыпынку: абсталяванне павінна быць абсталявана кнопкай аварыйнай прыпынку.
22. Абарона бяспекі: абсталяванне павінна быць абсталявана празрыстым ахоўным чахлом з тэрмапластычнага полікарбаната; Маецца ахоўная блакіроўка. Калі дзверцы ахоўнай вечка адчыняюцца, абсталяванне павінна мець магчымасць аўтаматычна спыніць тэставанне.
1.3 Умовы працы
Пры пакаёвай тэмпературы У дыяпазоне ад 10 ℃ да 35 ℃;
Адносная вільготнасць не больш за 80%;
Правільная ўстаноўка на трывалую аснову;
У чыстым асяроддзі без вібрацыі, агрэсіўных асяроддзяў і перашкод моцнага электрамагнітнага поля;
Дыяпазон ваганняў напружання крыніцы харчавання не павінен перавышаць намінальную напругу  10% .
10% .
2. Структурны склад
Тэставая машына падзелена на тры працоўныя станцыі, якія з'яўляюцца сістэмай прывада шпіндзеля, сістэмай загрузкі ўзору і восевай сілай. Тры працоўныя станцыі маюць адзін і той жа прывад шпіндзеля. Дынамічная сістэма і праграмная сістэма кіравання.
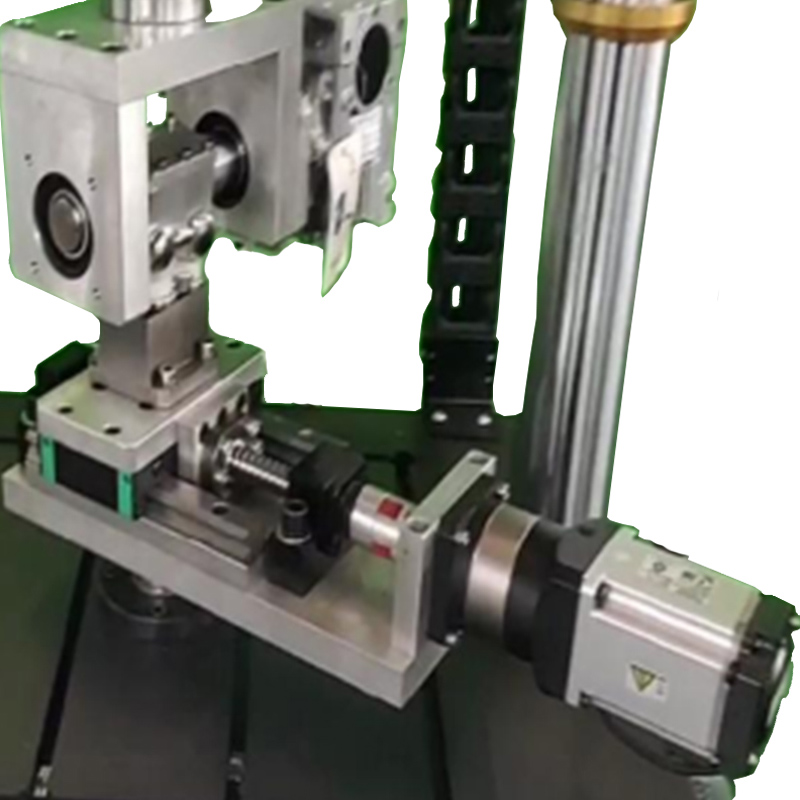
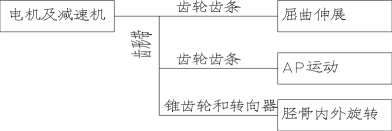
Сістэма прывада шпіндзеля 2.1
Вось рухавіка выкарыстоўвае інтэграваную сістэму кіравання хуткасцю сервапрывада Panasonic AC і рухавік. Максімальная магутнасць рухавіка складае 7,5 кВт, яго магутнасць падзелена на 3 выхадныя лініі.
Першы: пасля зубчастай рэйкі, электрамагнітнай муфты і датчыка крутоўнага моманту ён становіцца маятнікам сцегнавой косткі, які верціцца. Электрамагнітная муфта адказвае за ўключэнне і выключэнне харчавання, а датчык крутоўнага моманту адказвае за вымярэнне крутоўнага моманту . Вымерайце крутоўны момант падчас працы.
Другі: пасля праходжання зубчастага рамяня і зубчастай рэйкі ён становіцца зваротна-паступальным рухам налева і направа, кіруючы рухам узору AP.
Трэцяе: праз зубчасты рэмень, канічную шасцярню і рулявы механізм ператвараецца ў вярчальнае ваганне галёнкі, прымушаючы ўзор круціцца ўнутр і вонкі.
Маршрут перадачы паказаны на малюнку ніжэй.
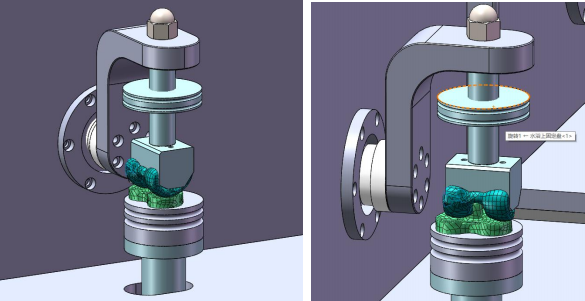
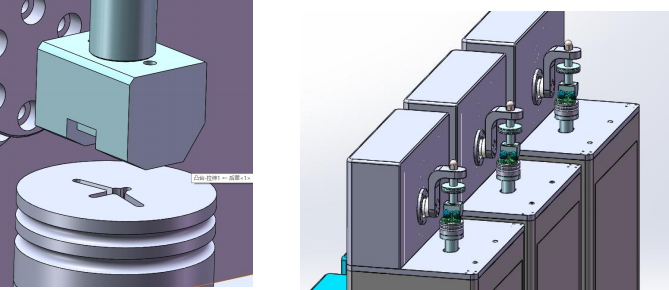
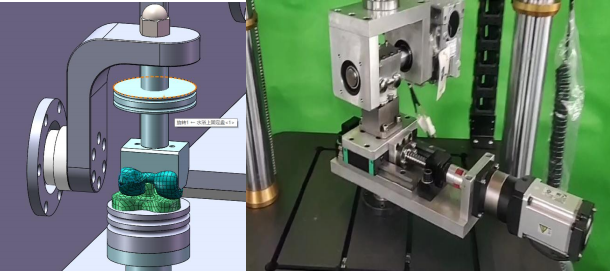
2.2 Сістэма загрузкі ўзораў
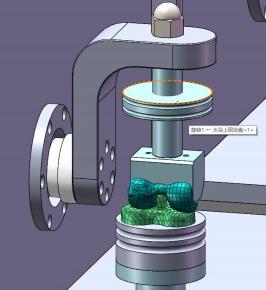
Сістэма нагрузкі ўзору імітуе свабоду руху ва ўмовах чалавека для кампанентаў імплантата каленнага сустава. Яна ўстаноўлена і замацавана. Ён складаецца з мантажнага сядзення, слізгальнага сядзення, нейлонавага сядзення, роліка, слізгальнай гільзы і г.д.
Канкрэтная рэалізацыя наступная:
Устаноўка зносаўстойлівасці каленнага сустава адносна складаная. Устанаўлівайце яго строга па схеме. Акрамя таго, мацуюцца адпаведныя каналы.
Калі ласка, выкарыстоўвайце адпаведны нумар правадоў пры злучэнні правадоў.
(Канструкцыя, паказаная на малюнку, выкарыстоўваецца толькі для дэманстрацыі прынцыпу руху, сапраўдны аб'ект мае перавагу)
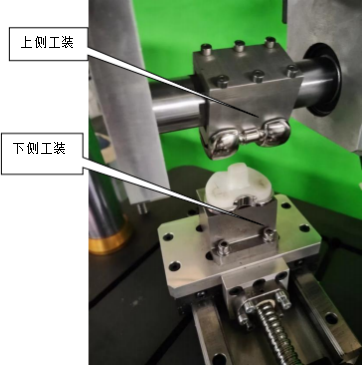

(Канструкцыя, паказаная на малюнку, выкарыстоўваецца толькі для дэманстрацыі прынцыпу руху, сапраўдны аб'ект мае перавагу)
Вам трэба паўторна апрацаваць верхні і ніжні інструменты ў адпаведнасці з узорам, каб адпавядаць патрабаванням выпрабаванняў. (Звесткі аб кожным памеры прадукту адрозніваюцца)

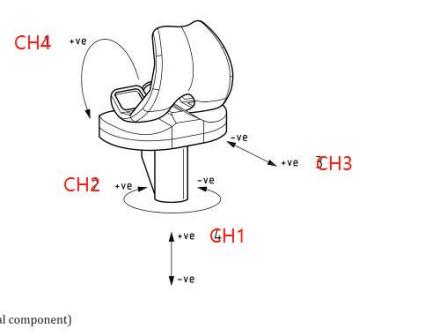
6. Выбар канала і адпаведныя налады
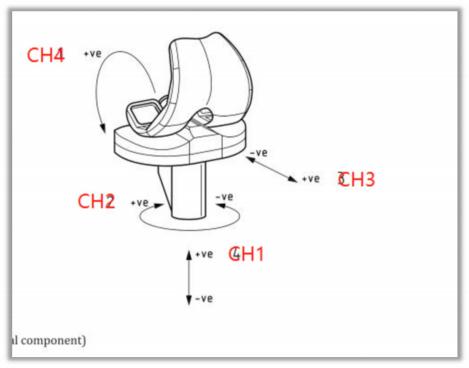
У спалучэнні з выявай вышэй, праверце, які канал працуе, праверыўшы канал. Пры выкананні ISO 14243.3 выберыце 1-4 праходы, канал 5 - гэта канал пашырэння для наступных абнаўленняў. Для іншых аднавосевых або двухвосевых эксперыментаў выберыце адпаведны канал.
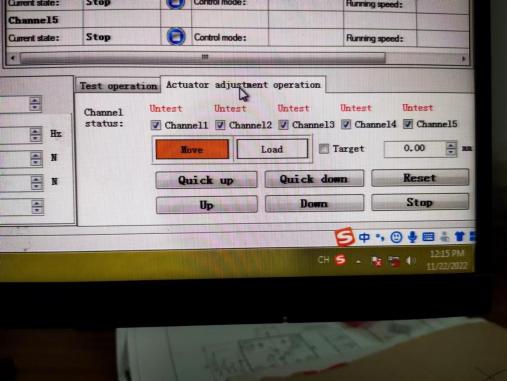
Quick up/up = хуткая загрузка/загрузка
Хуткі ўніз/уніз = Хуткі ўніз/уніз
7. У адпаведнасці з ISO 14243.3, неабходна імпартаваць форму сігналу кіравання, як паказана на малюнку:
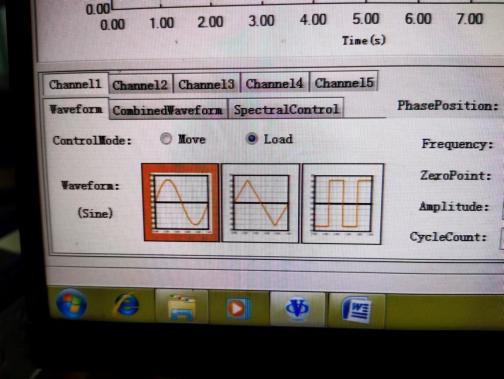
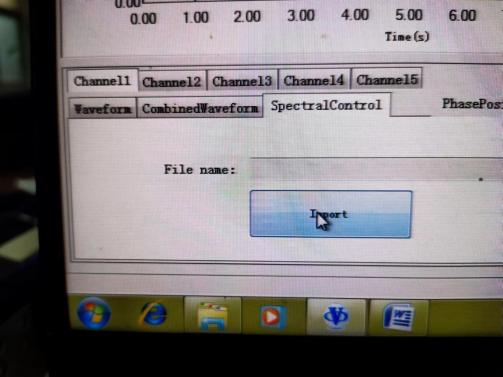
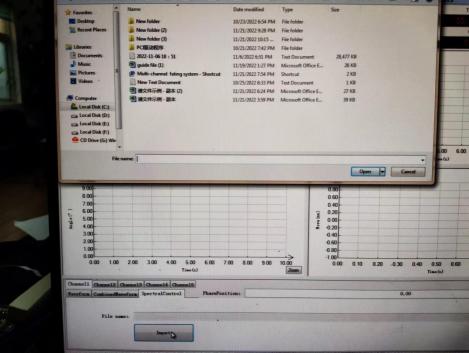
Выберыце фабрычна ўстаноўленую форму хвалі. Калі вам трэба ўсталяваць новую форму сігналу або дзеянне, вы можаце зрабіць гэта ў гэтым файле. Змяніць і захаваць пад іншым імем.
Для дэталёвых налад для кожнага канала, калі ласка, звярніцеся да інструкцыі па праграмным забеспячэнні для аднаго канала.
8. Пра абарону:
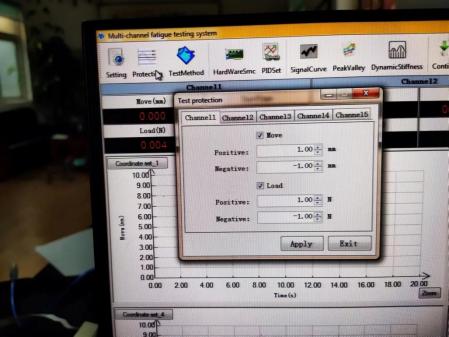
эксперымент не рухаецца або не можа быць запушчаны пасля націску «Пуск», праверце, ці ёсць якія-небудзь параметры, устаноўленыя за межамі допуску ў параметрах абароны.
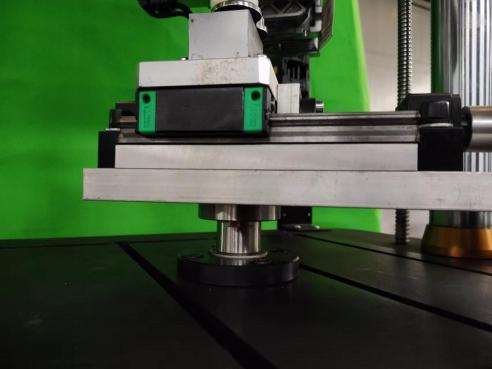
2.3 Сістэма восевай нагрузкі
Гэтая машына мае структуру спружыннай загрузкі. Загрузачны механізм прыводзіцца ў рух крокавым рухавіком, які перадаецца праз зубчасты рамень па дузе акружнасці, сінхронны шкіў і прэцызійную шарыка-шрубавую пару, і кіруецца дакладнай лінейнай накіроўвалай рэйкай для прывядзення ў рух сядзення прыкладання сілы. Сядзенне, якое прыкладае сілу, фіксуецца падпружыненым механізмам, які прыкладае сілу да рассоўнай платформы пасля сціску спружыны. Выпрабавальнае высілак паміж паверхнямі трэння ролікавага ўзору ўтвараецца . Кіруючы рухавіком, каб прымусіць сядзенне рухацца наперад і назад у прасторы, гэта значыць можна кантраляваць прымяненне і велічыню выпрабавальнай сілы. На плоскасці сядзення прыкладанні намаганняў усталяваны датчык нагрузкі. Збірайце сігналы сілы. Накіравальная падшыпніка лінейнага руху забяспечвае прымяненне і стабільнасць выпрабавальнай сілы. Частка спружыннай загрузкі Лёгка загружаць і разгружаць.
Калі сіла выпрабавання пачынае нагружацца, датчык будзе ўводзіць зададзены ціск у мікракампутарную сістэму кіравання, а зададзены ціск пасля гэтага мікракампутар кіруе рухавіком для зваротнага ходу, пакуль ціск у сістэме не будзе збалансаваны з зададзеным ціскам.
2.4 Сістэма замочвання грузу
скрынкі для апускання вадкасці, награвальніка, датчыка тэмпературы, перистальтической помпы, сіліконавай трубкі і г.д.
Кліенты могуць апрацоўваць пазіцыянуючыя адтуліны на цыліндрычнай кантавой паверхні ў адпаведнасці з фактычным памерам узору, а кут заціску можна рэгуляваць. Пасля рэгулявання вугла зафіксуйце левы паўзунок пазіцыянавання.



2.5 Праграмная сістэма кіравання
Сістэма кіравання ўсталёўваецца на машыну кіравання і злучаецца з тэставым хостам праз кабель сувязі. Аперацыйнае асяроддзе праграмнага забеспячэння - WINDOWS XP. Кіруючае праграмнае забеспячэнне ўяўляе сабой графічны інтэрактыўны аперацыйны інтэрфейс, які адказвае за адпраўку інструкцый для кіравання запускам і прыпынкам сістэмы, рабочай хуткасцю, сілай нагрузкі, тэмпературай апускальнай вадкасці і зборам дадзеных аб працы сістэмы, такіх як восевая сіла, крутоўны момант, тэмпература, час выпрабаванняў і г. д. падчас тэсту. Пасля разліку і апрацоўкі крывыя выпрабавальнай сілы-часу, крутоўнага моманту-часу і іншыя даныя выводзяцца ў выглядзе дыяграм.
У спалучэнні з выявай вышэй праверце канал, каб пацвердзіць, які канал працуе. Пры выкананні ISO 14243.3 выберыце 1-4 каналы, 5 т канал з'яўляецца каналам пашырэння для наступных абнаўленняў. Для іншых аднавосевых або двухвосевых эксперыментаў выберыце адпаведны канал.
Хуткі ўверх/уверх = хуткая загрузка/загрузка
Хуткае ўніз/уніз = хуткае выдаленне/выдаленне
7. У адпаведнасці з ISO 14243.3, неабходна імпартаваць форму сігналу кіравання, як паказана на малюнку:
Выберыце папярэдне зробленую на заводзе форму сігналу. Калі вам трэба задаць новую форму сігналу або дзеянне, вы можаце змяніць яго ў гэтым файле. Захаваць пад іншым імем.
Для дэталёвых налад для кожнага канала, калі ласка, звярніцеся да інструкцыі па праграмным забеспячэнні для аднаго канала.
8. Пра абарону:
эксперымент не рухаецца або не можа быць запушчаны пасля націску «Пуск», праверце, ці ёсць якія-небудзь параметры, устаноўленыя за межамі допуску ў параметрах абароны.